

目录
一拖二无刷电机通道闸控制板采用进口ARM处理芯片进行无刷电机控制和通道逻辑控制。支持最大6对独立红外,6路独立灯控,可控制摆闸、翼闸、速通门等逻辑。所有输入、输出以及电机控制均采用光耦隔离保证安全稳定运行,并对通信端口、电源端口进行了防雷设计。并采用多重防夹设计(电流、红外、电机状态),保证通行人员安全。
1、闸机类型:摆闸、速通门、翼闸、单摆。
2、限位方式:电机。
3、开闸速度:速通门<0.5S。
4、红外模式:5种布局。
5、通行方式:进自由/进刷卡/进常闭、出自由/出刷卡/出常闭。
6、开闸角度:45-90°可设置。
7、开闸速度:1--10等级可设置。
8、时间管理:可自由设置时间参数。
9、主副联机:通过1条总线连接和两根平行网线。
10、开闸方式:RS485/RS232/IO
11、开闸模式:正常开闸/紧急常开/掉电开闸
12、语音与显示:中文/英文
13、人员通过输出:
LCD/OC门/RS232
14、支持红外数量:3--6对,支持NPN/PNP。
15、灯带控制:4路独立灯带控制。
16、在线升级:支持通过RS232在线升级
17、状态检测:支持动态监测通道状态。
18、异常检测:支持机芯、电机、红外错误检测功能。
19、找零:上电自动找零。
60W电机--24V/7.5A以上电源;
灯带总长度>3米 需要12V,3A电源;
10、语音输出:支持4欧/5W喇叭,音量可调;
从板83cm*68mm
四、菜单使用
4.1按键说明
确认键 ---菜单开始键盘,也是确认键。
上键---菜单上选择,功能上选择。
下键---菜单下选择,功能下选择。
返回键---菜单返回上一层,以及取消设置。
4.2菜单唤醒
连续按下两次确认键(中间需要释放)。
4.3密码登录
密码为“上”、“上”,“下”,“下”,“上”,“下”。
4.4菜单项说明

一级菜单
二级菜单
参数说明
备注
通道参数
通道类型
摆闸、翼闸、速通门
默认摆闸
进门方式
自由、刷卡、常闭
默认刷卡
出门方式
自由、刷卡、常闭
默认刷卡
闸机速度
0--10
速通门推荐<4
开闸角度
30--90°
默认87°
工作模式
正常、测试
默认正常
关门方式
正常、安全、快速
正常:感应最后一个红外
安全:通道没人关门
快速:离开安全区关门
开闸累加
累加、不累加
可以连续刷卡累计人数并计数
通道内刷卡
允许、禁止
默认禁止:通道有人不允许刷卡
灯控模式
详见6.4灯条连接
4种模式可选
消防联动
进常开、出常开、常闭
取消消防输入退出消防状态
掉电开闸
进开闸,出开闸
断电后闸机开闸方向
反向闯入
关闸、保持
默认在安全情况下关闸处理
遇阻防夹
反转、保持
默认反转,摆臂反向动作
红外防夹
反转、保持
默认反转,摆臂反向动作
红外数量
详见6.13红外连接
默认为6B模式
尾随逻辑
保持、关门
关门是指第一人通过安全区
掉电速度
快速、正常
断电开闸的速度
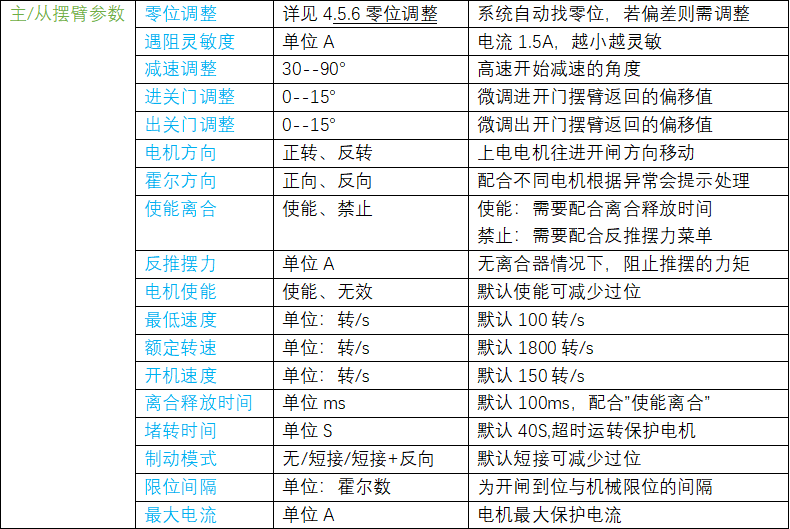
主/从摆臂参数
零位调整
详见4.5.6零位调整
系统自动找零位,若偏差则需调整
遇阻灵敏度
单位A
电流1.5A,越小越灵敏
减速调整
30--90°
高速开始减速的角度
进关门调整
0--15°
微调进开门摆臂返回的偏移值
出关门调整
0--15°
微调出开门摆臂返回的偏移值
电机方向
正转、反转
上电电机往进开闸方向移动
霍尔方向
正向、反向
配合不同电机根据异常会提示处理
使能离合
使能、禁止
使能:需要配合离合释放时间
禁止:需要配合反推摆力菜单
反推摆力
单位A
无离合器情况下,阻止推摆的力矩
电机使能
使能、无效
默认使能可减少过位
最低速度
单位:转/s
默认100转/s
额定转速
单位:转/s
默认1800转/s
开机速度
单位:转/s
默认150转/s
离合释放时间
单位ms
默认100ms,配合”使能离合”
堵转时间
单位S
默认40S,超时运转保护电机
制动模式
无/短接/短接+反向
默认短接可减少过位
限位间隔
单位:霍尔数
为开闸到位与机械限位的间隔
最大电流
单位A
电机最大保护电流
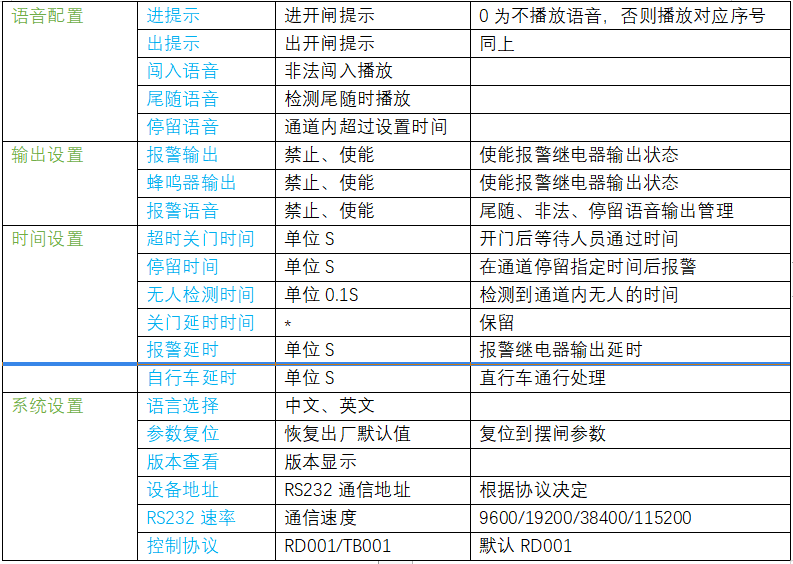
语音配置
进提示
进开闸提示
0为不播放语音,否则播放对应序号
出提示
出开闸提示
同上
闯入语音
非法闯入播放
尾随语音
检测尾随时播放
停留语音
通道内超过设置时间
输出设置
报警输出
禁止、使能
使能报警继电器输出状态
蜂鸣器输出
禁止、使能
使能报警继电器输出状态
报警语音
禁止、使能
尾随、非法、停留语音输出管理
时间设置
超时关门时间
单位S
开门后等待人员通过时间
停留时间
单位S
在通道停留指定时间后报警
无人检测时间
单位0.1S
检测到通道内无人的时间
关门延时时间
*
保留
报警延时
单位S
报警继电器输出延时
自行车延时
单位S
直行车通行处理
系统设置
语言选择
中文、英文
参数复位
恢复出厂默认值
复位到摆闸参数
版本查看
版本显示
设备地址
RS232通信地址
根据协议决定
RS232速率
通信速度
9600/19200/38400/115200
控制协议
RD001/TB001
默认RD001
4.5常用功能
4.5.1、通道类型
进入菜单-->选择“通道参数”--> 选择“通道类型”--> 选择类型-->按下确认-->重启设备。
4.5.2、红外数量
进入菜单-->选择“通道参数”--> 选择“红外数量”--> 选择红外数量-->确认保存-->重启设备。
4.5.3、开闸速度
进入菜单-->选择“通道参数”--> 选择“开闸速度”--> 调整速度(1---10)-->确认退出。
4.5.4、开闸角度
建议调整得到80--90之间。
进入菜单-->选择“通道参数”-->选择“开闸角度”--> 调整开闸角度(45--90)-->确认退出。
4.5.5、减速调整
进入菜单-->选择“主/从摆臂参数”-->选择“减速调整”-->调整角度-->确认退出。
4.5.6、零位调整
进入菜单-->选择“主/从摆臂参数”-->选择“零位调整”-->调整摆门到中间-->确认退出。
4.5.7、超时关闸时间
进入菜单-->选择“时间设置”-->选择“超时关门时间”-->调整超时时间-->确认退出。
4.5.8、开门方式设置
进入菜单-->选择“通道参数”-->选择“进开门方式”或者选择“出开门方式”-->调整开门方式-->确认退出。
4.5.9、测试模式与正常模式
进入菜单-->选择“通道参数”-->选择“工作模式”-->按下确认切换模式。
4.5.10、中英文切换
进入菜单-->选择“系统参数”-->选择“语言选择”--> 上下选择语言类型-->确认退出。
4.5.11、参数复位
进入菜单-->选择“系统参数”-->选择“参数复位”-->确认复位-->设备自动重启。
五、系统接线图
6.1硬件尺寸
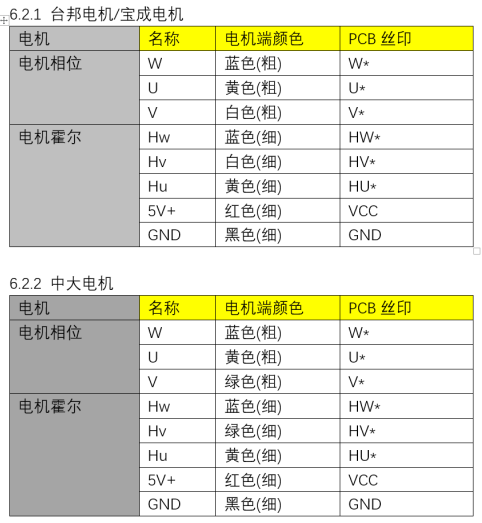
6.2电机连接
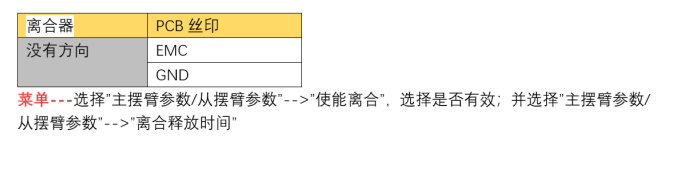
6.3 离合器连接
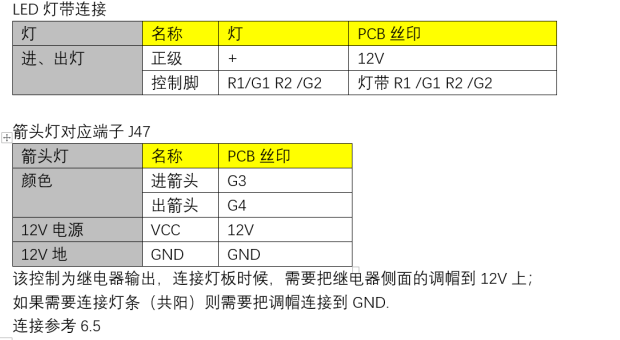
6.4 指示灯连接
注意:LED灯带长度(主从总长度)>3米,需要单独12V电源给LED灯供电;总长度>5米,需要扩展继电器驱动;
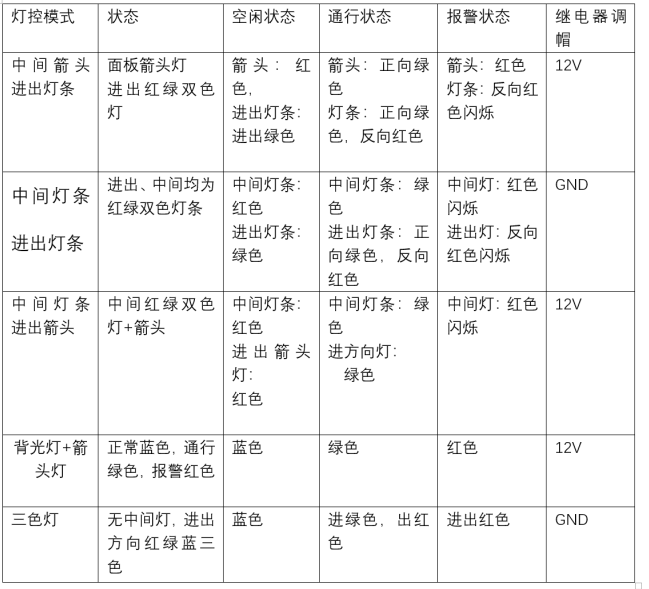
6.5 指示灯各种模式
注意:默认模式--"中间箭头进出灯条";
菜单---菜单中选择”通道参数”-->”灯控模式”选择:

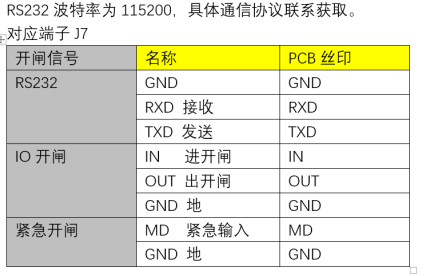
6.6开闸信号连接
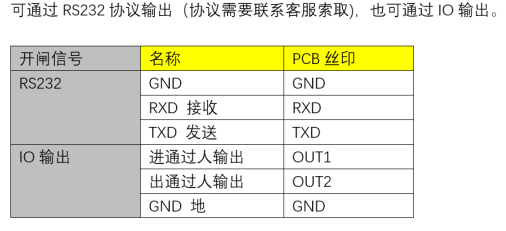
6.7 人员通过输出
6.8喇叭连接
喇叭支持最大功率为:4欧,10W。
建议4/8欧5W。

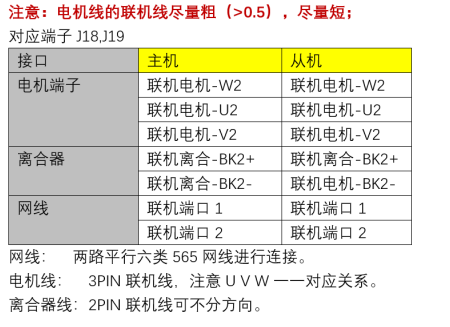
6.9 主从联机
注意:电机线的联机线尽量粗(>0.5),尽量短;
对应端子J18,J19
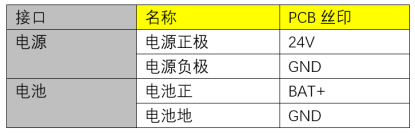
6.10电源/电池输入
建议电源选择24V/7A电源,电池选择12V/12AH或者12V超级电容
对应端子J1
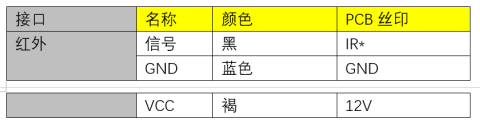
6.11红外类型
对应端子J29
板子支持NPN,PNP红外,仅仅需要板子上通过跳帽选择。
6.12红外连接
;
对应端子:J21-J26;
菜单---选择”通道参数”-->”红外数量”,选择通道匹配的数量
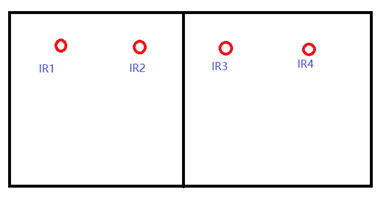
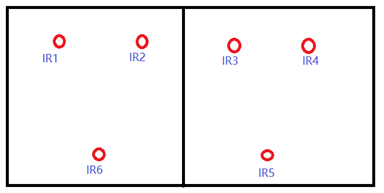
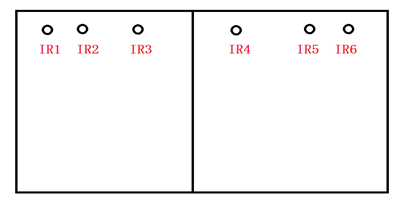
6.13红外布局
红外默认为6对6B模式
模式一:3对红外
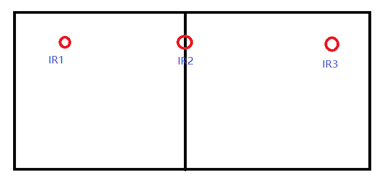
模式二:4对红外
模式三:5对红外
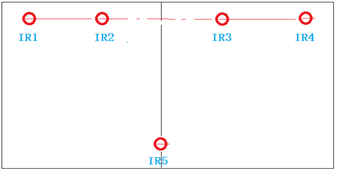
IR1 IR2为进人数统计,IR5为安全红外。IR3
IR4为出人数统计。建议人数统计红外距<120mm
模式四:6A对红外
模式五:6B对红外
IR1 IR2为进人数统计,IR3为安全红外。IR5 IR6为出人数统计,IR4为安全红外。建议人数统计红外距离<120mm
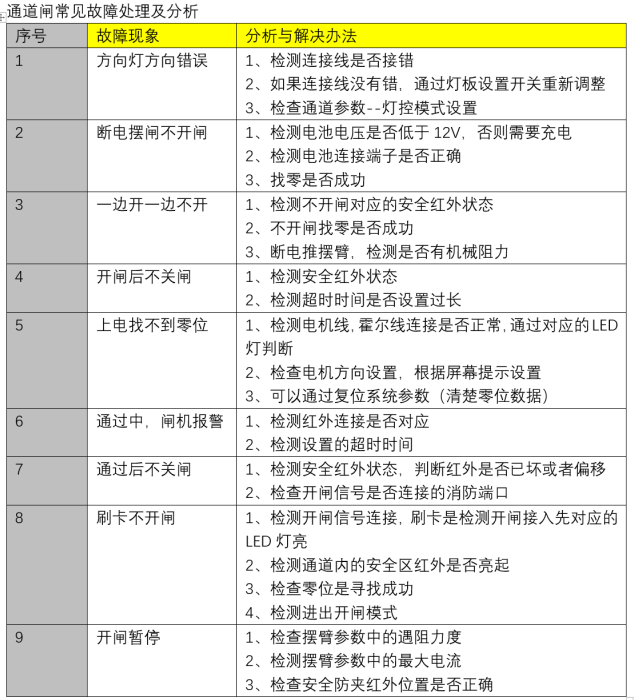
七、故障排除
通道闸常见故障处理及分析
八、机芯调试
8.1 翼闸调试
翼闸:上电的时候电机运转方向是先转到开到位,然后转动到关到位,如果反向则需要调整电机;
通道参数--->通道类型:齿轮翼闸
通道参数--->开闸速度:3
通道参数--->红外数量:6B
主/从摆臂参数--->遇阻力度:1500(mA)
主/从摆臂参数--->减速角度:65。
主/从摆臂参数--->电机方向:正
主/从摆臂参数--->霍尔方向:反(根据上电提示来设置)
主/从摆臂参数--->使能离合器:无效(离合器功能)
主/从摆臂参数--->反推摆力:2000(mA)
主/从摆臂参数--->最低速度:100(转)
主/从摆臂参数--->额定转速:2000(转)
主/从摆臂参数--->堵转时间:50(单位S)
8.2 摆闸调试
通道参数--->通道类型:摆闸
通道参数--->开闸速度:3
通道参数--->红外数量:6B
主/从摆臂参数--->遇阻力度:1500(mA)
主/从摆臂参数--->减速角度:65。
主/从摆臂参数--->电机方向:正
主/从摆臂参数--->霍尔方向:反(根据上电提示来设置)
主/从摆臂参数--->使能离合器:无效(离合器功能)
主/从摆臂参数--->反推摆力:2000(mA)
主/从摆臂参数--->最低速度:100(转)
主/从摆臂参数--->额定转速:2000(转)
主/从摆臂参数--->堵转时间:50(单位S)
8.3 速通门摆闸
通道参数--->通道类型:速通门
通道参数--->开闸速度:5
通道参数--->红外数量:6B
主/从摆臂参数--->减速角度:65(度)。
主/从摆臂参数--->电机方向:正
主/从摆臂参数--->霍尔方向:正(根据上电提示来设置)
主/从摆臂参数--->使能离合:使能
主/从摆臂参数--->遇阻灵敏度:1500(mA)
主/从摆臂参数--->最低速度:200(转)
主/从摆臂参数--->额定速度:1000(转)
主/从摆臂参数--->堵转时间:50(单位S)
主/从摆臂参数--->离合释放时间:100(单位ms)
主/从摆臂参数--->制动模式:短接
九、注意事项
8.1 设备使用之前先通过功能调试,调试正常后方可投入使用。
8.2 设备上电,严禁通道内站人。
8.3 读卡通行时,在方向指示器标志未转成绿色,严禁进入通道。
8.4 行人通过通道是,不要在通道内长时间停留。
8.5 通过通道时,不要拥挤,人与人之间保持一定距离。
8.6 严禁不读卡、快速通过通道。
8.7 建议在设备显眼处标识本机通行须知,指导通行者安全有序通行。
8.8 设备未工作时,妥善保管,断开电源,做好保护。
▲注意:
1、禁止私自从本机控制器取点,可能以前负载过大、过流损坏设备。由此引起的控制板损坏不在保修范围
2、做好防水处理,由此引起的控制板损坏不在保修范围。
十、保修说明
本公司产品自购买之日起一年内,如果非人为损坏的性能故障,本公司将负责免费维修。
在免费维修期内人为或者自然灾害引起的故障或损坏,需要收取维修成本费。
在免费维修期以外的维修服务需要收取维修成本。